RX1 Humanoid Hand Assembly Instruction
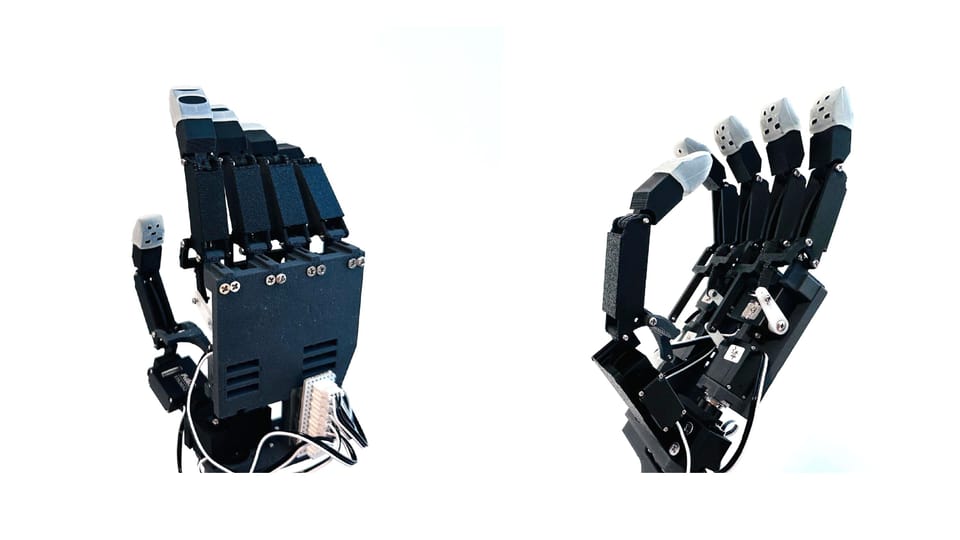
This article is about the assembly of the hand for the RX1 humanoid robot.
- Section 1 covers the background information
- Section 2 lists out all the components to be prepared
- Section 3 includes all the assembly steps
Section 1 Background
RX1 is an opensource humanoid with two human-scale arms (no legs). It's built with low-cost servo motors (see more information in previous posts rx1 servo and rx1 arm).
Section 2 Preparation
You can obtain the CAD file and all 3D printed parts through the rx1_hand_hardware github repo.

Here are all the parts needed (for one hand that has 5 fingers and 1 thumb rotational joint):
- 4 x Feetech SCS0009 servo (Single shaft)
- for pinky, ring and middle finger, and the thumb rotational joint
- 2 x Feetech STS3032 servo (Single shaft)
- for index finger and thumb
- 17 x M3 screws (12mm)
- 4 x M3 screws (8mm)
- 10 x M2 screws (15mm)
- 10 x M2 screws (6mm)
- 15 x M2 screws (5mm)
- 24 x M2 self tapping screws (5mm)
- 1 x 6703 bearing
- 1 x silicone fingertip (example link)
(Note that the thumb rotational joint should be SCS0009, while all remaining 5 servos can be either SCS0009 or STS3032. Thus alternatively you can go with 5 x STS3032 + 1 x SCS0009 for better performance, or 6 x SCS0009 to save costs)
Also, you will need to make the following modifications to the servo horns:

Section 3 Assembly
Checkout the video and drawings below for the asembly process. Overall it should take about 30min to 1 hour.
Step 1 Fingers assembly

Step 2 Servos assembly
Note that you need to use the servo software to make sure all servos are at neutral angles (512 for SCS0009 servos, 2048 for STS3032 servos) before assembly.




Step 3 Assemble fingers to the palm


Step 4 Assemble the hand to the arm

What's next:
Will go through the overall bom, other remaining hardware parts including head, torso etc. and software setup in the following weeks. I am aiming to make one to two posts per week.
If you have any question or feedback (for the design itself or the way it's presented) please leave comments below. Also, please subscribe to see the latest updates!
Member discussion