RX1 Humanoid ROS Driver Open Sourced!
 Red-Rabbit-Robotics
Red-Rabbit-RoboticsIntroduction
RX1 Humanoid is an opensource robot project. This repo is a ROS1 meta package containing basic functioning packages of the RX1 humanoid including the following:
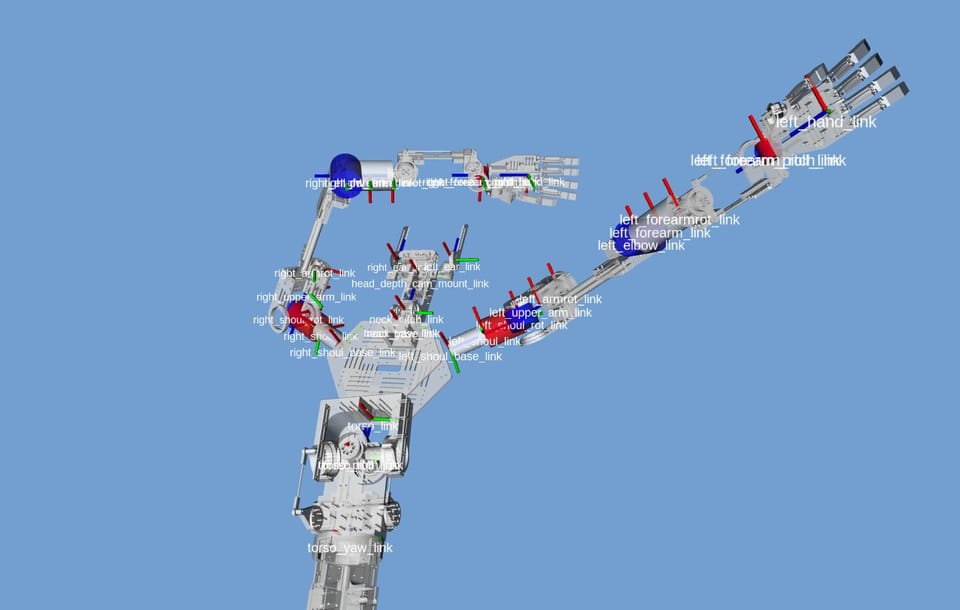
- rx1_description: URDF file
- rx1_motor: Feetech servo motor control
- rx1_ik: Inverse Kinematics demo
- rx1_bringup: Launch everything
Installation
Assuming you have already had ROS 1 Noetic or Melodic installed in your Ubuntu computer.
Dependencies:
- feetech_lib
- ik_solver_lib
- other packages listed in the package.xml files you can install through:
rosdep install --from-paths src --ignore-src -r -y
Demo
-
Test the URDF
roslaunch rx1_description urdf_test.launch
You should be able control the joint angles through sliders.
-
Test the inverse kinematics
roslaunch rx1_description urdf.launch
roslaunch rx1_ik rx1_ik_marker.launch
You should be able click and drag the end effector poses to play with the ik.
-
Test with the actual robots
Go to rx1_motor.launch file and modify the USB port value to the corresponding one of your Feetech servo controller board.
Then, after doing either 1 or 2 above, type:
roslaunch rx1_motor rx1_motor.launch
You should be able to see the actual robot move based on your commands.


Extra notes
- Note that some of the mesh files don't match exactly the latest CAD file of the RX1 Humanoid robot due to development overtime. The overall shape stays the same though.
- There is no Gazebo Simulation at the moment. And the inertia values in the urdf are placeholders.
- To launch everything by
roslaunch rx1_bringup bringup.launch, you need to have the depth camera's ROS package OrbbecSDK_ROS1 installed as well.
If you have any question or feedback please leave comments below. Also, please subscribe to see the latest updates!
Member discussion